หุ่นยนต์เตะฟุตบอล SKUBA แชมป์โลก 3 สมัย
หนึ่งในผลงานที่น่าภูมิใจของคณะวิศวกรรมศาสตร์ ที่สร้างชื่อเสียงระดับโลกติดต่อกันเป็นเวลาหลายปี ก็คือทีมหุ่นยนต์เตะฟุตบอล SKUBA ที่คว้าแชมป์โลก RoboCup Soccer ประเภท small size league ติดต่อกันเป็นสมัยที่ 3 เมื่อเดือนกรกฎาคม 2554 ที่ผ่านมา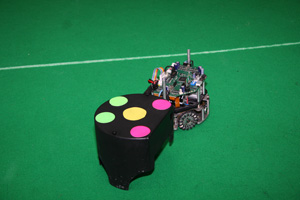
ในการแข่งขันหุ่นยนต์เตะฟุตบอลประเภท small size league นั้น แต่ละทีมมีหุ่นยนต์ 5 ตัว แบ่งแยกทีมด้วยสีสัญลักษณ์ที่ต่างกัน ตัวถังเป็นรูปทรงกระบอกเส้นผ่าศูนย์กลาง 180 มิลลิเมตร และสูงไม่เกิน 150 มิลลิเมตร แข่งขันกันบนสนามซึ่งเป็นพื้นพรม ขนาด 6.05 x 4.05 เมตร หุ่นยนต์จะถูกควบคุมและสั่งการโดยคอมพิวเตอร์ที่อยู่นอกสนาม และหุ่นยนต์แต่ละตัวจะติดต่อถึงกันด้วยระบบการสื่อสารไร้สาย โดยมีกล้องซึ่งติดตั้งอยู่เหนือสนามขึ้นไปที่ระดับ 4 เมตร เพื่อจับตำแหน่งในสนามของหุ่นยนต์ทุกตัวรวมทั้งลูกบอลด้วย
ทีม SKUBA มีหุ่นนักเตะ 5 ตัว และหุ่นสำรอง 5 ตัว ทางทีมได้มีการพัฒนาความสามารถของหุ่นยนต์อย่างต่อเนื่องทั้งด้านซอฟต์แวร์และฮาร์ดแวร์ ปัจจุบันหุ่นยนต์ของทีม SKUBA ได้พัฒนาตัวถังของหุ่นยนต์โดยใช้อลูมิเนียม อัลลอยด์ ทำให้หุ่นยนต์ทนต่อการกระแทกได้มากขึ้น ส่วนล้อของหุ่นยนต์ได้ใช้ยางคู่ ทำให้หุ่นยนต์เคลื่อนที่ไปยังตำแหน่งที่ต้องการได้ถูกต้องถึง 99 % และมีระบบ Top Control ซึ่งช่วยในการเคลื่อนที่บนพื้นสนามที่เป็นพรม แม้ว่าพื้นพรมจะมีความหนาบางแตกต่างกัน หุ่นยนต์จะวิ่งได้ในความเร็วที่เท่าเดิม ไม่มีการสะดุด นอกจากนี้ ยังมีการใช้กล้องจับตำแหน่งหุ่นยนต์รุ่นใหม่ สามารถเก็บภาพได้มากกว่าเดิมทำให้มองเห็นเกมการแข่งขันได้เร็วขึ้น รวมถึงการเขียนโปรแกรม AI หรือปัญญาประดิษฐ์แบบใหม่ ให้หุ่นยนต์สามารถตัดสินเองในการแก้เกมการแข่งขันได้อย่างรวดเร็ว
และเคล็ดลับที่สำคัญของทีมคือ ทีม SKUBA มีการทำงานเป็นทีมที่ดีมาก ช่วยกันคิดและหาแนวทางในการตั้งรับการจู่โจมของฝ่ายตรงข้ามจากการศึกษาแผนการเล่นของทีมต่าง ๆ พร้อมทั้งคิดหาวิธีทำให้หุ่นยนต์ทีมของเราสามารถจู่โจมได้เร็วและแม่นยำมากขึ้นตลอดเวลา แม้สมาชิกในทีมจะเปลี่ยนไปเรื่อย ๆ เนื่องจากนิสิตได้จบการศึกษาไป แต่ทีม SKUBA ก็ได้ส่งต่อความรู้จากรุ่นก่อน ๆ ไปยังนิสิตที่เข้ามาร่วมทีมรุ่นถัด ๆ ไป ทำให้สามารถสร้างผลงานได้อย่างต่อเนื่อง
นอกจากการแข่งฟุตบอลที่ทีม SKUBA ได้เป็นแชมป์โลกแล้ว ทีม SKUBA ยังเคยได้รับรางวัลอื่น ๆ จาการแข่งขันอีกเช่น รางวัล Best Extended Team Description ในปี 2009 ซึ่งเป็นการนำเสนอผลการศึกษาวิจัยของหุ่นยนต์นักเตะทีม SKUBA ซึ่งจะมีทีมอื่นๆ จากทั่วโลกนำไปใช้เป็นทฤษฎีอ้างอิงในเรื่องการเคลื่อนไหวของหุ่นยนต์เตะฟุตบอล รวมทั้งได้รับรางวัลเทคนิคยอดเยี่ยมจากการแข่งขันในปีต่าง ๆ อีกหลายครั้ง เช่น รางวัลระบบนำทางยอดเยี่ยม และรางวัลผสมทีมยอดเยี่ยม เป็นต้น

นิสิตวิศวกรรมศาสตร์ ทีม SKUBA ในปีล่าสุดประกอบด้วย นายพีรพัฒน์ กิตติบริลักษณ์ นิสิตชั้นปีที่ 4 ภาควิชาวิศวกรรมเครื่องกล นายกฤษฎิ์ ชัยโส นิสิตชั้นปีที่ 3 ภาควิชาวิศวกรรมคอมพิวเตอร์ นายธีรธัช อริยชาติผดุงกิจ(หัวหน้าทีม) นิสิตชั้นปีที่ 3 ภาควิชาวิศวกรรมไฟฟ้า นายศุภวิชญ์ ศิริวรรณ นิสิตชั้นปีที่ 2 ภาควิชาวิศวกรรมไฟฟ้า นายภาวัต เลิศอริยศักดิ์ชัย นิสิตชั้นปีที่ 2 ภาควิชาวิศวกรรมคอมพิวเตอร์ นายธนากร ปัญญาเปียง นิสิตชั้นปีที่ 2 ภาควิชาวิศวกรรมซอฟแวร์และความรู้ นายณัฐพล รัญเสวะ นิสิตชั้นปีที่ 4 ภาควิชาวิศวกรรมคอมพิวเตอร์ และนายคัคนะ ธิมาชัย นิสิตชั้นปีที่ 4 ภาควิชาวิศวกรรมคอมพิวเตอร์โดยมี อาจารย์ปัญญา เหล่าอนันต์ธนา อาจารย์กาญจนพันธุ์ สุขวิชชัย และอาจารย์ยอดเยี่ยม ทิพย์สุวรรณ์ เป็นอาจารย์ที่ปรึกษา
วิดีโอแสดงผลงานการแข่งขัน


